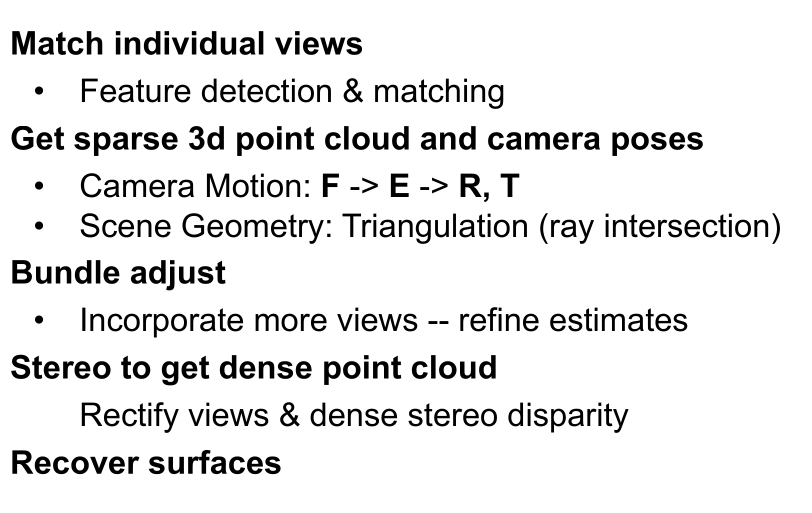
3D Reconstruction Pipeline (Structure from Motion)
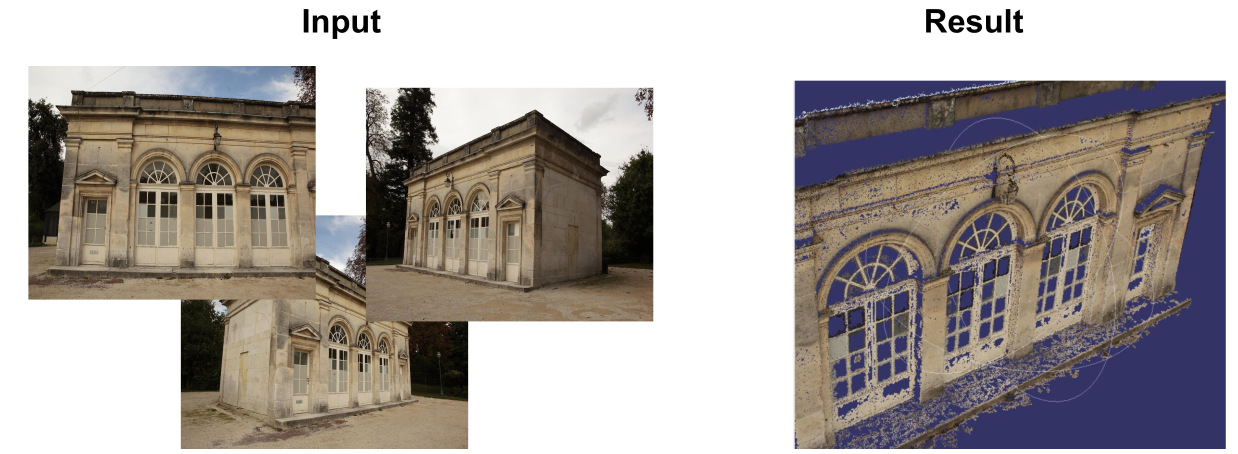
The following is the basic workflow to recover 3D data:
The algorithm below assumes that the structure is static.
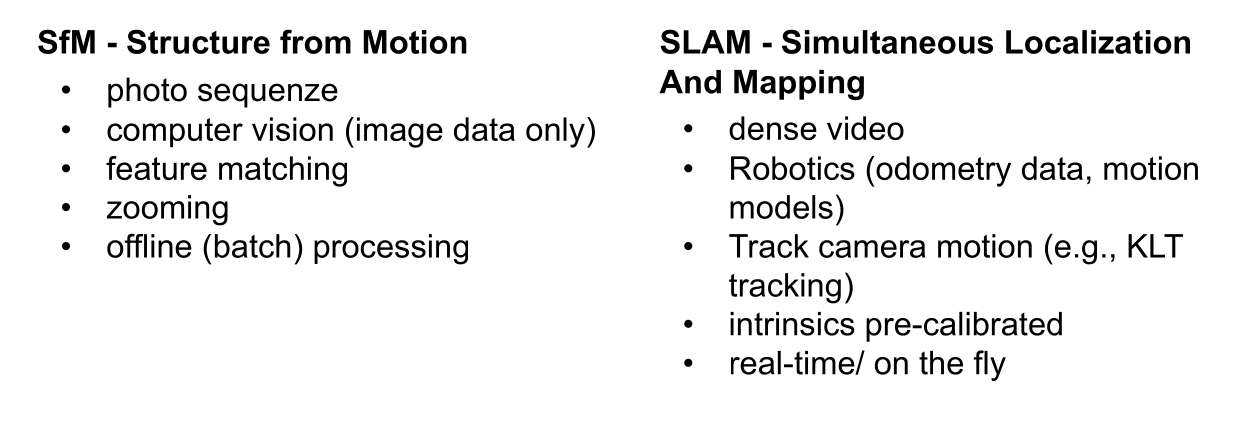
Structure from Motion (SfM) vs Simultaneous Localisation And Mapping (SLAM)
Get Point Correspondences
When talking about still images, one usually talks about structure from motion. On the other hand, when taking about finding correspondences in a video, this is called SLAM. However, both use the same basic algorithm.
Finding Camera Position
To get the camera position, the foundation matrix \(F\) needs to be recovered. See Intro/Stereo to see the details.
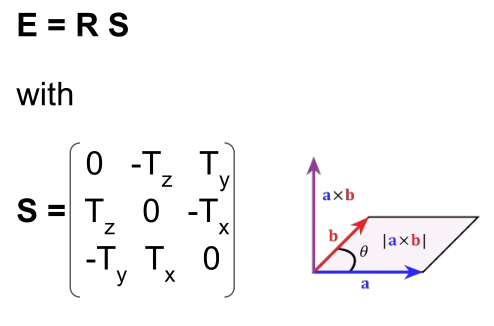
The steps are \(F \to E \to R,T\) to get the rotation matrix \(R\) and the translation matrix \(T\) of the camera.
Scene Structure: Triangulation
TODO
In praxis, usually there will not be a point that satifies both contraints, since there is noise. This is solved by using a direct linear transform, which performs a least square problem.
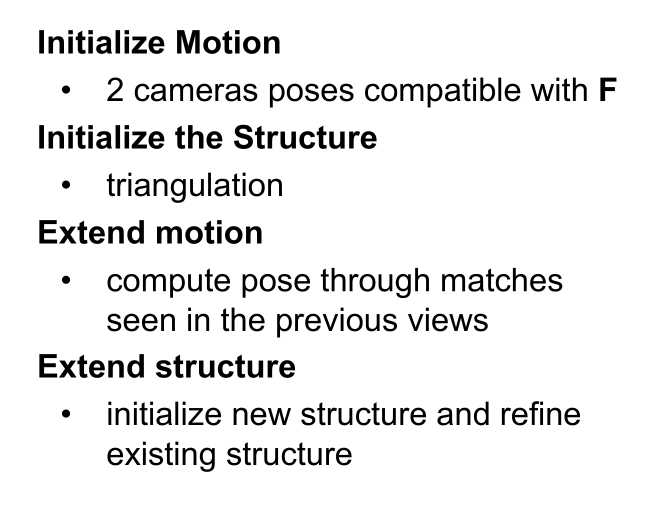
Sequential Structure from Motion