Vektorräume
Definition von Vektorräumen
Ein Vektorraum ist eine Menge \(V\) mit den Funktionen Addition und Skalar-Multiplikation: $$ +:V \times V \rightarrow V\ \cdot : \R \times V \rightarrow V $$ Dabei müssen folgende Gesetze existieren:
- Kommutativgesetz: \(a + b = b + a\)
- Assoziativgesetzt: \(a + (b + c)=(a + b) + c\)
- Es gibt ein neutrales Element \(\vec 0\), für welches gilt \(a + 0v = \vec a\) und \(0v \in V\)
- Für jedes Element \(a \in V\) muss es ein inverses Element \(-a \in V\) geben, so dass \(a + (-a) = 0v\) ergibt.
- Assoziativgesetzt: \(\lambda \cdot (\mu \cdot a) = (\lambda \cdot \mu) \cdot a\)
- Distributivgesetzt: \(\lambda \cdot(a + b) = \lambda \cdot a + \lambda \cdot b\)
- Distirbutgesetzt: \((\lambda + \mu)\cdot a = \lambda \cdot a + \mu \cdot a\)
- Für jedes Element \(a \in V\) gibt es ein neutrales Element \(1\cdot a = a\),
Frage: muss das Skalar über \(\R\) erstellt werden oder könnte auch eine andere Menge genommen werden.
Reeler Vektoraum
Das neutrale Element bei der Addition ist der Nullvektor \(\vec 0\) und das neutrale Element bei der Skalarmultiplikation ist \(1\).
Unterräume
Eine Teilmenge \(U\) eines Vektorraums \(V\) heisst Unterraum von \(V\), wenn \(U\) selbst auch ein Vektorraum ist. Dafür müssen folgende Kriterien erfüllt sein:
- Für beliebige Element \(a, b \in U\) ist auch \(a+b\in U\)
- Für jeden Skalar \(\lambda \in \R\) und jedes Element \(a\in U\) ist auch \(\lambda \cdot a\in U\)
- Die neutralen Elemente der Addition und Skalarmultiplikation müssen ebenfalls in \(U\) sein.
Linearer Spann
\(spann(\vec a_1, \vec a_2, ..., \vec a_n)\) ist definiert als alle möglichen Vektoren von der Linearkombination \(\lambda_1\cdot \vec a_1 + \lambda_2\cdot \vec a_2 +...+\lambda_n\cdot \vec a_n\)§
Die Vektoren \(\vec a_1, \vec a_2, ...\vec a_n\) spannen den linearen Spann auf und formen eine geometrische Form.
Geometrische Objekte
Jenachdem, wie viele Vektoren gegeben sind, wird ein anderes geometrisches Objekt gebildet:
- Bei
1Vektor, wird eine Ursprungs-Gerade gebildet - Bei
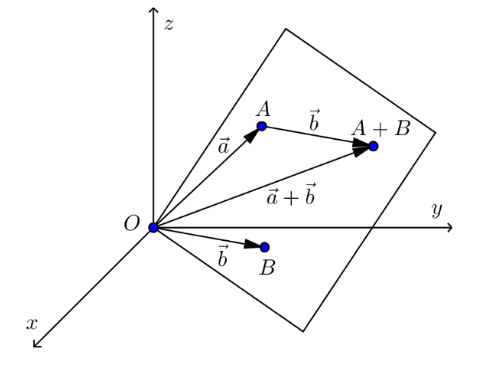
2Vektoren, wird eine Ursprungs-Ebene - Bei
3Vektoren, wird ein "Ursprungs-Körper" gebildet
Erzeugendensystem
Eine Menge von Vektoren \(\{\vec b_1, \vec b_2, ..., \vec b_N\}\) bildet ein Erzeugendensystem von \(V\), falls \(V=span(\vec b_1, \vec b_2, ..., \vec b_n)\). Dies ist nur der Fall, wenn die Vektoren nicht kollinear, bzw. komplanar sind.
Aus dem gehen die folgenden folgende Bedingungen: $$ \begin{align} & V=span(\vec b_1, \vec b_2, ..., \vec b_n)\ \Leftrightarrow \text{ } & B\cdot \vec x = \vec a \text { für jedes } \vec a \in \R^m\ \Leftrightarrow \text{ } & rg(B)=m \end{align} $$
Mit den Vektoren \(\vec b_i\) in einem Erzeugendensystem können alle anderen Vektor \(V\) (also z.B. \(\R^2\)) bilden.
Basis und Dimensionen
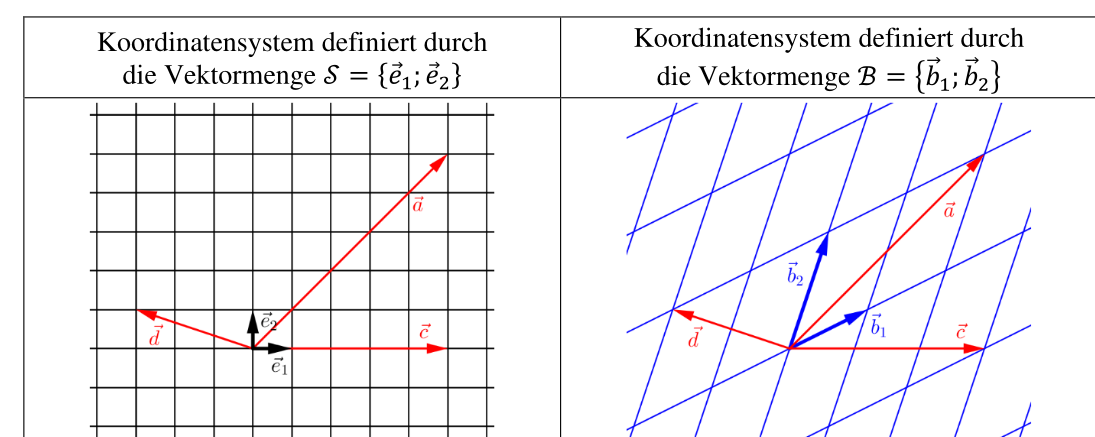
Ein Vektor \(\vec a = \pmatrix{a_1 \\ a_2}\) kann auch als \(\vec a = a_1\cdot \vec e_1 + a_2 \cdot \vec e_2\) geschrieben werden. Anstatt der Vektormenge \(\mathcal S=\{\vec e_1; \vec e_2\}\) kann auch eine andere Menge \(\mathcal B=\{\vec b_1; \vec b_2\}\) benützt werden. Der Vektor \(\vec a = \pmatrix{\alpha_1\\ \alpha_2}_\mathcal{B}\) ist nun equivalent zu \(\vec a=\alpha_1 \cdot \vec b_1 + \alpha_2 \cdot \vec b_2\).
In diesem Beispiel sind die Vektoren \(\vec a\), \(\vec c\) und \(\vec d\) die selben, nur die Vektormenge, durch welche das Koordinatensystem definiert wird, ändert sich.
Damit dies möglich ist, muss die Vektormenge folgende Eigenschaften erfüllen:
- \(\mathcal B=\{\vec b_1, \vec b_2, ...,\vec b_n\}\) muss ein Erzeugendensystem sein
- \(\vec b_1\), \(\vec b_2\), ..., \(\vec b\) müssen linear unabhängig sein
Oder in Deutsch: Es darf nur genau eine mögliche Linearkombination für jeden Vektor geben
Aus diesen zwei Regeln gehen folgende Sätze hervor:
- Eine Basis \(\R^n\) besteht genau aus \(n\) Vektoren
- \(\rm rg(B)=n\) (wobei \(B\) alle Vektoren in eine Matrix gesteckt werden)
- \(\det(B)\neq 0\)
- \(B\) ist invertierbar
- Das lineare Gleichungssystem \(B\cdot \vec x=\vec c\) hat genau eine eindeutige Lösung
Dimensionen
Die Dimension \(\dim(V)\) gibt an, wie viel Dimensionen ein Vektorraum oder Basis hat.
Bei einer Basis \(\mathcal B\) ist die Basis die Anzahl Vektoren, welche die Basis definiert. Das heisst \(\dim(\R^n)=n\) und \(\mathrm{dim}(\mathbb P_n[x])=n+1\)
Bei einem Vektorraum ist die Anzahl Dimensionen gleich der Anzahl Vektoren, welche den Spann des Vektorraumes definieren. Bei Vektorräume gilt auch, dass ein Unterraum \(R\) von \(V\) : \(\dim(R) \le \dim(V)\). Die Dimension des Vektorraums \(\{\vec 0\}\) ist gleich \(\dim(\{\vec 0\})=0\)
TODO: Matrixen
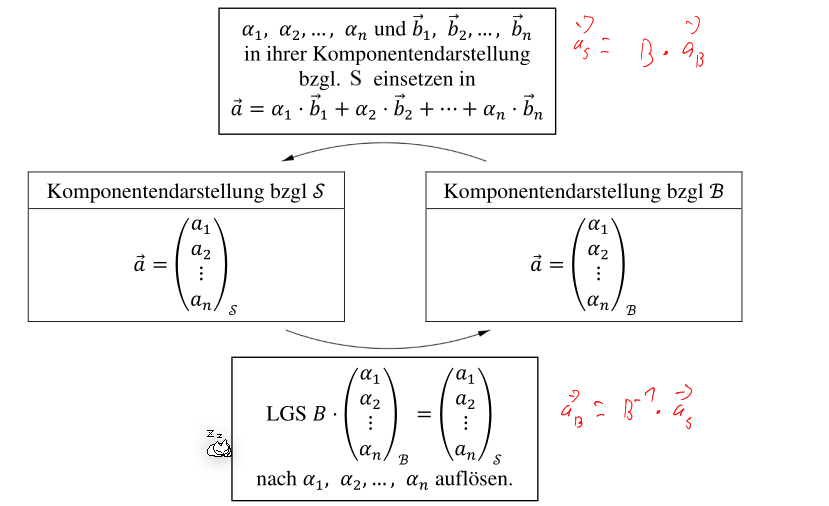
Umwandeln zwischen Komponentendarstellungen
Um einen Vektor \(\vec v_{\mathcal B}\) in den Vektor \(\vec v_{\mathcal{S}}\) zu umwandeln, kann folgendes getan werden: \(\vec v_{\mathcal B}=v_1\cdot \vec b_1+v_2\cdot \vec b_2+...+v_n\cdot \vec b_n\)
In die umgekehrte Richtung gibt es ein Lineares Gleichungssystem: \(\vec v_\mathcal{S}\cdot B=\vec v_\mathcal{B}\)