Komplexe Zahlen
Eine Komplexe Zahl hat einen imaginären und einen realen Komponent. Diese werden entweder in der Form \(z=x+iy\) oder der Form \(P(x, y)\) geschrieben, wobei gilt \(x, y \in \R\).
\(i\) ist definiert als \(i^2=-1\)
Die Definition von \(\C\) ist \(\C=\{z | z = x+iy \wedge x,y \in \R \}\)
Es gibt zudem noch die Funktionen \(\Re(z)=x\) und \(\Im(z)=y\) (für \(z = x+iy\))
Da eine komplexe Zahl als Punkt dargestellt werden, kann auch der Betrag berechnet werden: \(|z|=\sqrt{x^2+y^2}=\sqrt{z\cdot z^*}\)
Konjugierte Komplexe Zahlen
Die konjugierte komplexe Zahl von \(z = x + yi\) ist \(z^*=x-iy\) und ist entlang der x-Achse gespiegelt.
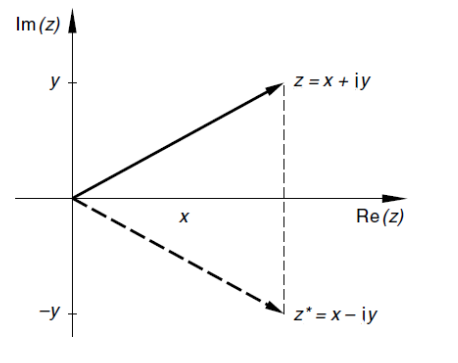
Der Term \(z\cdot z^*=(x+yi)\cdot(x-yi)=x^2-i^2y^2=x^2-(-1)y^2=x^2+y^2\) zeigt, wie \(\sqrt{z\cdot z^*}=|z|\) und \(z\cdot z^*=|z|^2\) (Achtung: Der Betrag ist wichtig!)
Darstellungs Formen
- Koordinaten-Form: \(P(x, y)\)
- Normal-Form: \(z = x + yi\)
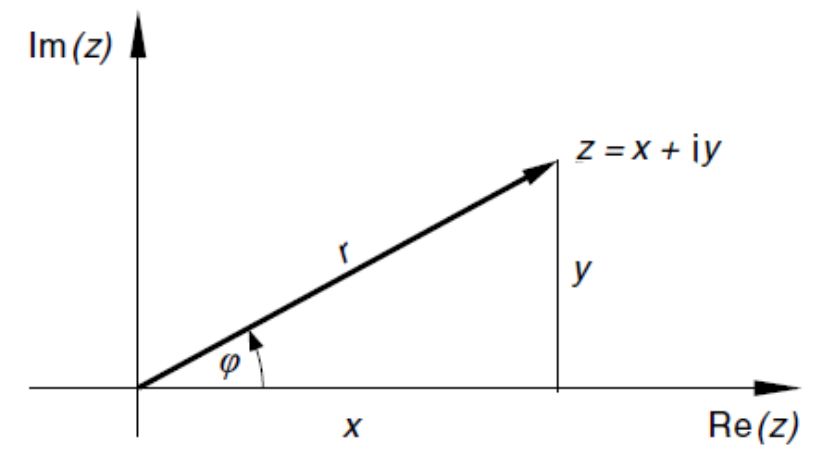
- Trigometrische-Form (aka Polar-Form): \(z=r\cdot (\cos \phi + i\cdot \sin \phi)\) (\(r\) ist dabei die Länge)
- Exponential-Form: \(re^{i\varphi}\) (\(r\) ist dabei die Länge)
Als Beispiel: $z = 1 + 1i = \sqrt 2 (\cos{\frac \pi 4} + i \sin{\frac \pi 4}) = \sqrt 2 \cdot e^{i\cdot \frac \pi 4} $
Um zwischen der Exponetialform und der Koordinationsform zu konvertieren, gilt: $$ \text{Für: } z=x+y\ x = r\cdot \cos(\varphi)\ y = r\cdot \sin(\varphi) $$
Grundrechungsarten
- Summieren: \(z_1 + z_2 = (x_1 + x_2) + i(y_1 + y_2)\)
- Subtrahieren: \(z_1 - z_2 = (x_1 - x_2) + i(y_1 - y_2)\)
- Multiplizieren: \(z_1 \cdot z_2 = (x_1 \cdot x_2 - y_1\cdot y_3) + i(x_1\cdot y_2 +x_2 \cdot y_1)\)
- Dividieren: \(\frac {z_1}{z_2}=\frac {z_1\cdot z_2^*}{z_2 \cdot z_2^*}=\frac {(x_1 + iy_1)(x_2-iy_2)}{(x_2 + iy_2)(x_2 - iy_2)}=\frac {(x_1 + iy_1)(x_2-iy_2)}{x_2^2-y_2^2}\)
- Potenzieren: \(z^n=(re^{i\varphi})^n=r^n\cdot e^{i\varphi n}\)
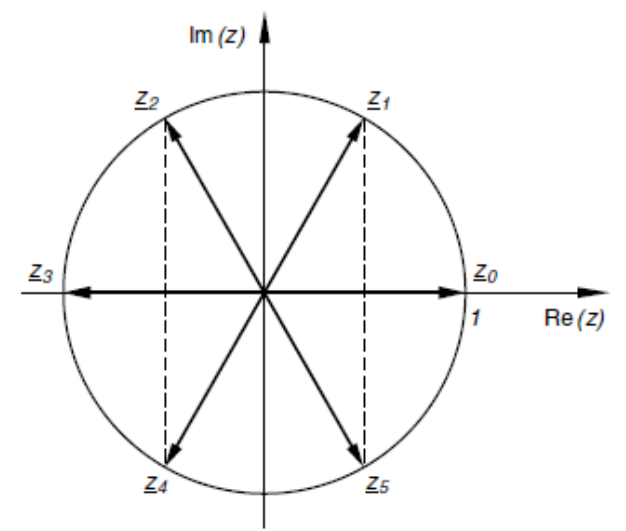
- Wurzel-Ziehen: \(\sqrt[n]{z}=z^{\frac 1 n}=r^{\frac 1 n}\cdot e^{\frac {i\varphi + 2\pi \cdot k} n}\), wobei \(k=0, 1, 2, ..., n-1\) (Bei \(k\ge n\) wiederholen sich die Lösungen)
Ein Vorteil der Exponential-Form ist, dass Rechnungen um einiges einfacher von der Hand gehen: $$ z_1=r_1e^{i\varphi_1}\ z_2=r_2e^{i\varphi_2}\ z_1z_2=r_1e^{i\varphi_1}\cdot r_2e^{i\varphi_2} = r_1r_2\left(e^{i\varphi_1+i\varphi_2}\right) $$
Polynome Lösen
Für das Polynom \(a_nx^n+a_{n-1}x^{n-1}+...+a_1x^1+a_0=0\) und \(a_i, x \in \R\), dann gibt es genau \(n\) Lösungen und kann maximal \(n\) reale Lösungen geben. $$ z^6=1 $$
Eigenwerte
Für eine Matrix \(A \in R^{n\times n}\) nennt sich \(\lambda \in \C\) Eigenwert und den Vektor \(x\in \C^n\setminus \{0\}\) Eigenvektor, wenn folgendes gilt: $$ \begin{align} A\vec x &= \lambda \vec x \ \Rightarrow A\vec x - \lambda \vec x &= 0 \ \Rightarrow (A-\lambda I_n)\vec x &= 0 \end{align} $$ Wenn \(A\) bekannt ist und \(\lambda\) und \(\vec x\) ausgerechnet werden soll, kann mithilfe dem charakteristischem Polynom berechnet werden.
Die Eigenwerte von \(A^{-1}\) sind die Kehrwerte \(\frac 1 {\lambda_i}\) .
Spektrum
Das Spektrum \(\sigma(A)\) ist die Menge aller Eigenwerte von der Matrix \(A\).
Spur und Determinante
Die Spur und Determinante von \(A\) (nicht \(A-\lambda I_n\)) kann mit den Eigenwerten ausgerechnet werden. $$ \DeclareMathOperator{\tr}{tr} \begin{align} \det(A)&=\lambda_1\cdot \lambda_2 \cdot \cdot \cdot \lambda_n\ \tr(A)&=a_11 + a_22 + ... + a_nn = \lambda_1 + \lambda_2 + ... + \lambda_n \end{align} $$
Charakteristisches Polynom
Das charakteristische Polynom ist definiert das Polynom zum berechnen der Determinante von \(A-\lambda I_n\). Um \(\lambda\) auszurechnen, kann das charakteristische Polynom mit \(0\) gleichgesetzt werden. Das Polynom ist vom Grad \(n\) und hat somit auch \(n\) Lösungen.
Wenn \(A-\lambda I_n\) eine Diagonalmatrix, obere Dreiecksmatrix oder untere Dreiecksmatrix ist, dann gilt: $$ \det(A-\lambda I_n)=(a_{11}-\lambda)(a_{22}-\lambda)...(a_{nn}-\lambda) $$
Determinante
Für \(A\in \R^{2\times 2}\) gilt: $$ \det(A)= a_{11}\cdot a_{22}- a_{12}\cdot a_{21} $$ Für \(A \in R^{3\times 3}\) gilt: $$ \det(A)=b_{11} (b_{22}b_{33} - b_{23}b_{32})-b_{12}(b_{21}b_{33}-b_{23}b_{31}) + b_{13}(b_{21}b_{32} - b_{22}b_{31}) $$
Konditionierung
Da, wenn die Eigenwerte mit dem charakteristischen Polynom ausgerechnet werden, ein schlecht konditioniertes Problem entsteht, sollten in der Praxis nie Eigenwerte für \(A\) mit \(n>3\) mit dem charakteristischen Polynom und dessen Nullstellen berechnet werden.
Eigenvektoren & Eigenraum
Die Eigenvektoren können ausgerechnet werden, in dem die Eigenwerte \(\lambda\) in die Matrix \(A-\lambda I_n\) eingesetzt werden. Es gibt für eine Matrix \(A\in R^{n\times n}\) ein Gleichungssystem mit \(n-\rg(A-\lambda I_n) \DeclareMathOperator{\rg}{rg}\) freien Parametern.
Vielfachheit
Die geometrische Vielfachheit ist definiert als die Dimension des Eigenraums von \(\lambda\). Sie gibt die Anzahl der linearen unabhängigen Eigenvektoren zum Eigenwert an und kann mit \(n - \rg(A-\lambda I_n)\) berechnet werden
Die algebraische Vielfachheit ist die Multiplizität eines Eigenwertes, bzw. wie oft ein Eigenwert auf taucht.
Die geometrische Vielfachheit ist immer gleich oder kleiner als die algebraische Vielfachheit. Dies heisst, dass wenn ein Eigenwert \(\lambda\) \(k\)-fach auftritt und somit eine algebraische Vielfachkeit \(k\) hat, dann gehören mindestens ein und höchstens \(k\) linear unabhängige Eigenvektoren zu \(\lambda\).
Wenn alle \(n\) Eigenwerte verschieden sind, so gehört zu jedem Eigenwert \(\lambda\) genau ein linear unabhängiger Eigenvektor, welcher bis einen Faktor eindeutig bestimmbar ist.
Numerische Berechnung von Eigenwerte und Eigenvektoren
Es gilt, wenn zwei Matrizen \(A, B \in \R^2\) zueinander ähnlich sind, dann gilt das \(A\) und \(B\) die selben Eigenwerte inkl. deren algebraischen Vielfachen.
Ähnliche & Diagonalisierbare Matrix
Eine Matrix \(A\in R^{n\times n}\) ist ähnlich zu der Matrix \(B\in R^{n\times n}\), wenn eine reguläre Matrix \(T\) existiert, mit welcher gilt:
$$
B=T^{-1}AT
$$
Ein Spezialfall davon ist, wenn \(B\) eine Diagonalmatrix ist. Dann ist \(A\) diagonalisierbar.
Wenn zwei Matrizen ähnlich zueinander sind, dann gilt:
- Sie haben dieselbe Eigenwerte, inkl. deren algebraischen Vielfachheiten (und auch dem charakteristischen Polynom)
- Ist \(\vec x\) ein Eigenvektor zum Eigenwert \(\lambda\) von \(B\), dann ist \(T\vec x\) ein Eigenvektor zum Eigenwert \(\lambda\) von \(A\)
- Wenn \(A\) diagonalisierbar ist, dann sind die Diagonalelemente von \(B\) die Eigenwerte von \(A\) und die linear unabhängige Eigenvektoren von \(A\) stehen in den Spalten von \(T\)
Spektralradius (und Spektralnorm)
Der Spektralradius von der Matrix \(A\) ist definiert als der höchste Eigenwert von \(A\).
QR-Verfahren
Das QR-Verfahren ist ein iterativen Algorithmus, mit welchem mithilfe der QR-Zerlerung eine obere Dreiecksmatrix \(B\) gefunden wird, welch ähnlich zu \(A\) ist und somit die selben Eigenwerte wie \(A\) besetitzt.
Zu Beginn ist \(A\in \R^{n\times n}=A_0\) und \(P_0 \in R^{n\times n}=I_n\). Dann wird für \(i=0, 1, 2, ...\) folgende Schritte durchgeführt. $$ \begin{align} A_i&:=Q_i\cdot R_i\ A_{i+1}&:=R_i\cdot Q_i \ P_{i+1}&:= P_i \cdot Q_i \end{align} $$ Die Matrix \(A_i\) konvergiert für \(i\to \infty\) gegen eine Matrix \(A_\infty\), bei welcher die Diagonale nur einzelne Elemente oder \(2\times 2\)-Blöcke aufweist. Die Eigenwerte sind die einzelnen Elemente und die Eigenwerte der \(2\times 2\)-Blöcke.
Die \(2\times 2\)-Blöcke bilden sich, wenn das algebraische Vielfache eines \(\lambda\) grösser als \(1\) ist. Umgekehrt gilt, wenn alle Eigenwerte betragsmässig verschieden sind (also \(\forall i,j \in \N |\lambda_i|\neq |\lambda_j|\wedge i\neq j\)), dann gibt es keine \(2\times 2\)-Blöcke.
Falls \(A\) symetrisch ist (\(A^T=A\)) und \(\forall i,j \in \N |\lambda_i|\neq |\lambda_j|\wedge i\neq j\) gilt, dann konvergiert die Folge der Matrizen \(P_k=Q_0\cdot Q_1\cdot \cdot \cdot Q_k\) gegen eine orthogonale Matrix (\(Q^T=Q^{-1}\)), deren Spalten die Eigenvektoren von \(A\) bilden.
von-Mises-Iteration (Power Method)
Für die von-Mises-Iteration muss ein \(A\in R^{n \times n}\) diagonalisierbar sein und ein Startvektor \(v_0\in \C^n\) mit der Länge \(1\) definiert sein. $$ \begin{align} v_{k+1}&=\frac{Av_k}{||Av_k||2}\ \lambda \end{align} $$}&=\frac{v_k^TAv_k}{v_k^Tv_k