Differentialgleichungen
Eine gewöhnliche Differentialgleichung ist eine Gleichung, welche nur nach einer Variable abgeleitet wird:
$$
\frac{\part y}{\part t} = f(t, y(t))
$$
Im oben Beispiel ist es eine gewöhnliche Differentialgleichung 1. Ordnung, da nur einmal Abgeleitet wurde.
Genereller ausgedrückt, folgendes ist eine gewöhnliche Differentialgleichung \(n\)-ter Ordnung:
$$
y^{(n)}(x) = f(x, y(x), y'(x), ..., y^{(n-1)}(x))
$$
Eine allgemeine Lösung für eine Differentialgleichung \(n\)-ter Ordnung hat \(n\) unabhängige Parameter (von den Integrationskonstanten).
Differentialgleichungen, welche die folgende Form haben
$$
\frac{\part n}{\part t}=-\lambda n
$$
haben die Lösung \(n(t)\):
$$
n(t)=n_0e^{-\lambda t}
$$
Anfangswertproblem
Bei einem Anfangswertproblem wird, zusätzlich zu der Gleichung, den Funktionswert bei \(x_0\), wie auch den Wert für jede benützte Ableitung bei dem selben Wert \(x_0\).
Als Beispiel für folgende Funktion \(s\) wird \(C_1\) und \(C_2\) benötigt, damit ein Resultat berechnet werden kann. Es wird also \(s(t=0)\) und \(s'(t=0)\) benötigt, um das Anfangswertproblem zu lösen.
$$
s''=g\
s(t)=\frac 1 2 g t^2 + C_1t + C_2\
s(t=0)=C_2\
s'(t=0)=v(t=0)=C_1
$$
Richtungsfelder
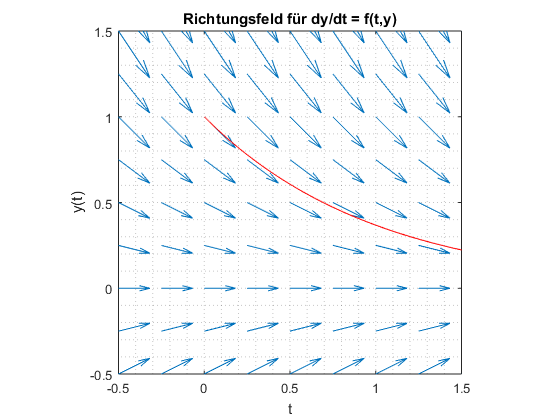
Ein Richtungsfeld stellt die Steigung als Pfeile dar. Dafür wurde in diesem Beispiel alle \(y'\) für alle Punkte berechnet und eingezeichnet.
Eulerverfahren
Klassisch
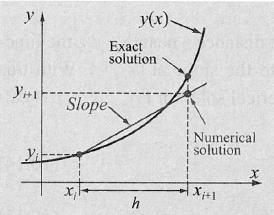
Um eine Lösung für eine Differentialgleichung mit einem Richtungsfeld zu finden, kann eine Schrittweite \(h\) definiert werden. Jeder Punkt \((x_i, y_i)\) soll nun den Pfeilen im Feld folgen. Dies kann folgendermassen für eine Differentialgleichung \(y'=f(x, y)\) erledigt werden:
$$
\begin{align}
x_{i+1} &= x_i + h\
y_{i+1} &= y_i + y' \cdot h \
&= y_i + f(x_i, y_i) \cdot h
\end{align}
$$
Zusätzlich wird auch noch ein Startpunkt \((x_0, y_0)\) benötigt.
Mittelpunkt
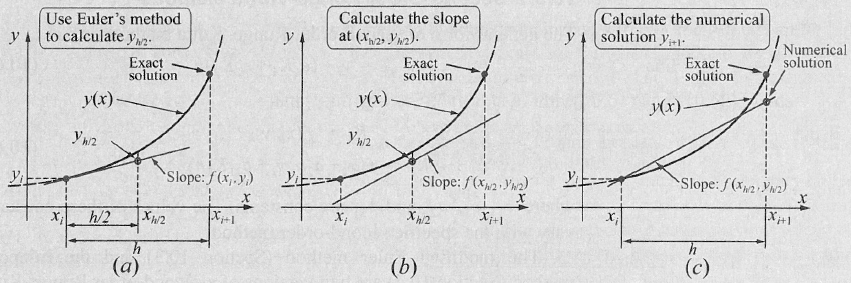
Im Vergleich zum Eulerverfahren, wo die Steigung beim Punkt \((x_i, y_i)\) berechnet wird, wird beim Mittelpunkt-Verfahren die Steigung bei \((x_i+\frac h 2, y_i + \frac h 2)\) berechnet.
Dafür muss aber der Punkt \((x_i+\frac h 2, y_i + \frac h 2)\) zuerst berechnet werden. Daher ergibt sich folgendes:
$$
\begin{align}
x_{h/2} &= x_i + \frac h 2\
y_{h/2} &= y_i + \frac h 2 \cdot f(x_i, y_i)\
\
x_{i+1} &= x_i + h\
y_{i+1} &= y_i + f(x_{h/2}, y_{h/2}) \cdot h
\end{align}
$$
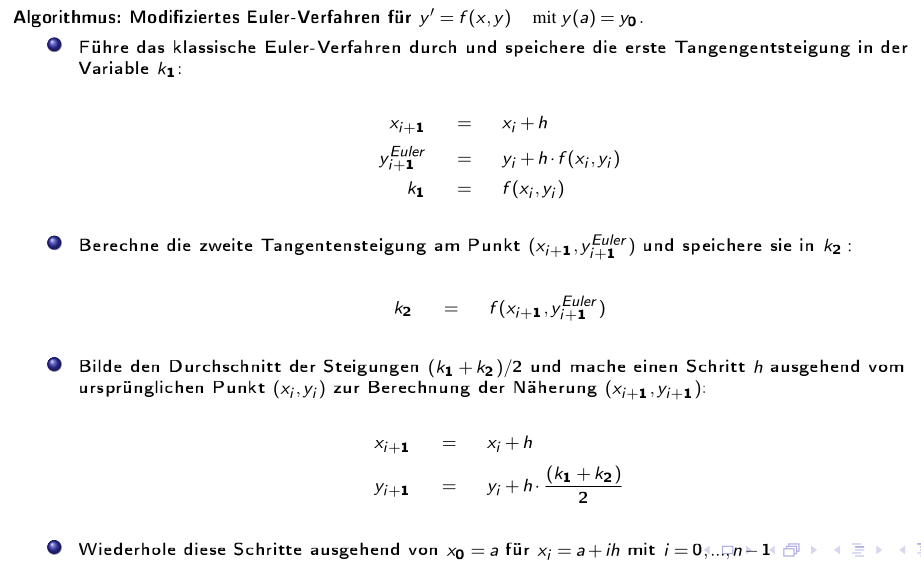
Modifiziert
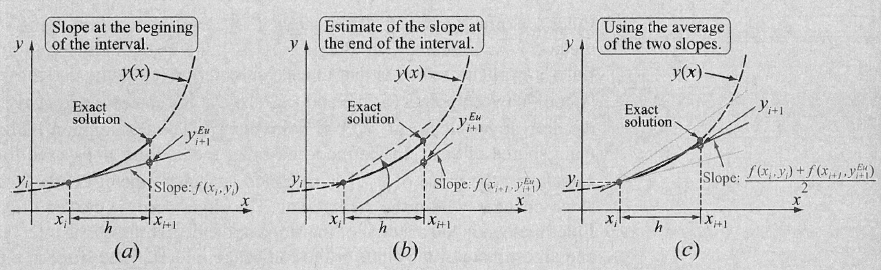
Beim modifizierten Verfahren wird zuerst die Steigung bei \((x_i, y_i)\) und bei \((x_{i+1}, y_{i+1})\) berechnet. Danach wird der nächste Punkt mit dem Mittel zwischen den beiden Steigungen den nächsten Punkt berechnet.
Fehler
Der lokaler Fehler ist definiert als: $$ \varphi(x_i, h) := y(x_{i+1}) - y_{i+1} $$ Wenn der lokaler Fehler folgendermassen schreiben kann, dann hat es die Konsistenzordnung \(p\): $$ \varphi(x_i, h)\le C\cdot h^{p+1} $$ Ebenfalls gibt es ein globalen Fehler, welcher definiert ist als: $$ y(x_n)-y_n $$ Wenn der globalen Fehler folgendermassen schreiben kann, dann hat es folgende Konvergenzordnung \(p\): $$ |y(x_n)-y_n| \le C\cdot h^p $$ Wie auch an den Formeln von der Konsistenzordnung und Konvergenzordnung zu sehen ist, hängt dieser Fehler von der Schrittweite \(h\) ab.
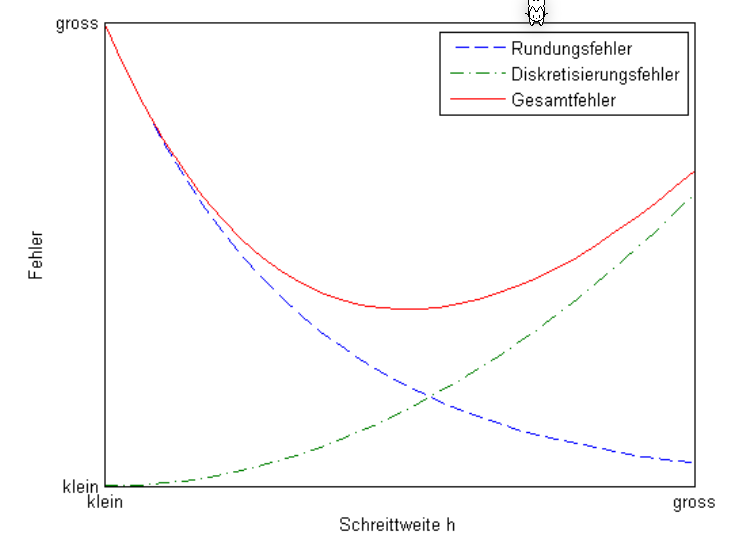
Es ist interesant ein Verfahren mit der Konvergenzordnung \(p\ge 1\) und \(h<1\), da dann \(C\cdot h^p\) gegen \(0\) strebt.
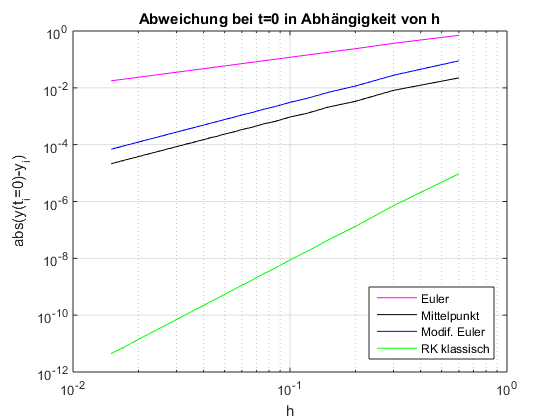
Für das Eulerverfahren gilt folgenden lokalen Fehler: $$ \begin{align} \varphi(x_n, h)=\frac{h^2}{2}y''(z) &&\text{, wobei } z \in [x_n, x_n+h] \end{align} $$ Das Mittelpunkt und modifizierte Eulerverfahren haben eine Konsistenz- und Konvergenzordnung \(p=2\).
In der folgenden Abbildung ist der lokale Fehler für diverse Verfahren auf einem log-log Plot:
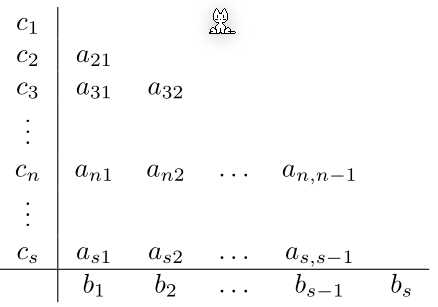
Runge-Kutta Verfahren
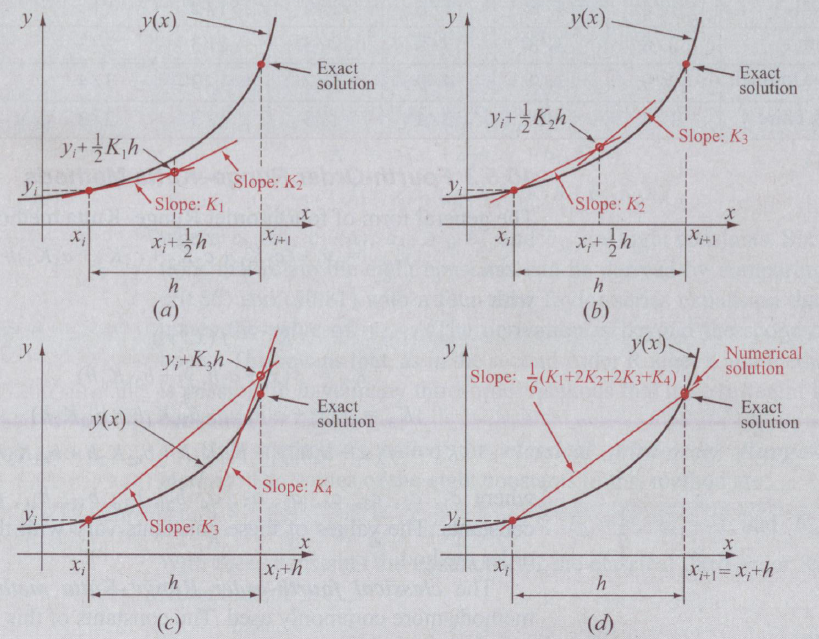
Im Runge-Kutta-Verfahren wird zuerst die Steigung \(k_1\) bei \(x_i\) berechnet, dann \(k_2\) in der Mitte zwischen \(x_i\) und \(x_{i+1}\), \(k_3\) ist ebenfalls beim Mittelpunkt, aber mit der Steigung \(k_2\). Zuletzt wird \(k_4\) am Punkt \(x_{i+1}\) berechnet.
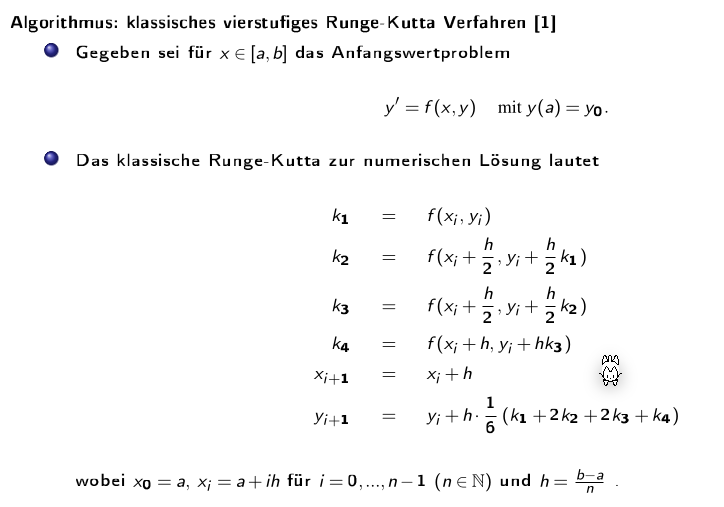
Die Konsistenz- und Konvergenzordnung von Runge-Kutta ist \(p=4\).
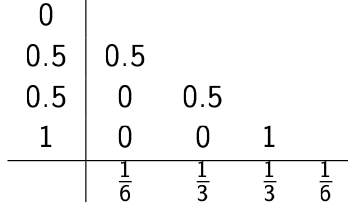
Allgemeines s-stufiges Runge-Kutta-Verfahren
Das allgemeine s-stufige Runge-Kutta-Verfahren: $$ \begin{align} k_n&=f\left(x_i + c_nh, y+h \sum^{n-1}{m=1}a n=1,...,s\ y_{i+1}&=y_i+h\sum^s_{n=1}b_nk_n \end{align} $$ Dabei ist }k_m\right) && \text{für \(s\in \N\) die Stufenzahl und \(a_{nm}\), \(b_n\) und \(c_n\) sind Konstante.
- Euler-Verfahren: \(s=1\)
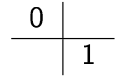
- Mittelpunkt-Verfahren: \(s=2\)
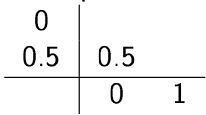
- Modifiziertes Euler-Verfahren: \(s=2\)
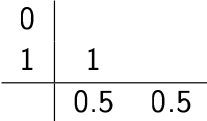
- Klassisches Runge-Kutta Verfahren: \(s=4\)
Differentialgleichung-System
Um ein Differentialgleichung-System zu lösen, kann \(y(x)\) als vektorwertige Funktion geschrieben werden.
Das Euler-Verfahren kann folgendermassen für Vektoren angepasst werden: $$ x_{i+1}=x_i + h\ \vec y_{i+1}=\vec y_i + \vec f(x_i, y_i)\cdot h $$ Oben ist es mit dem klassischen Eulerverfahren beschrieben. Dies kann aber mit allen Eulerverfahren gelöst werden.
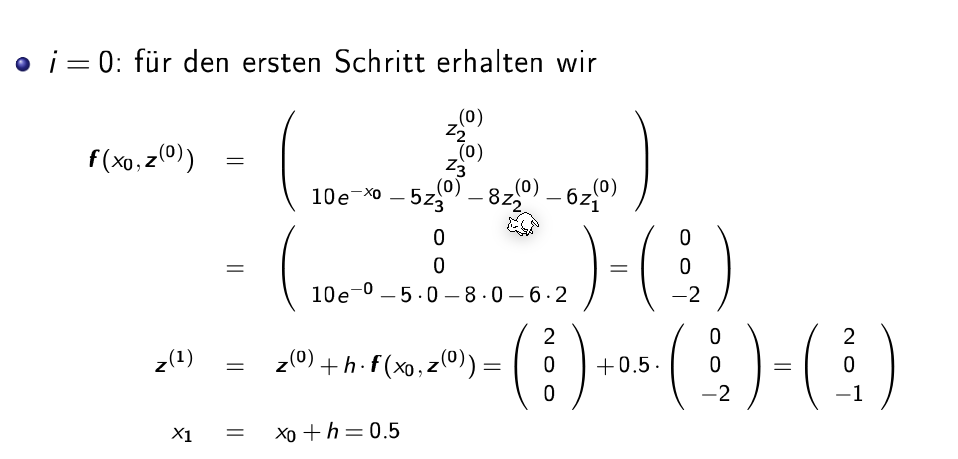
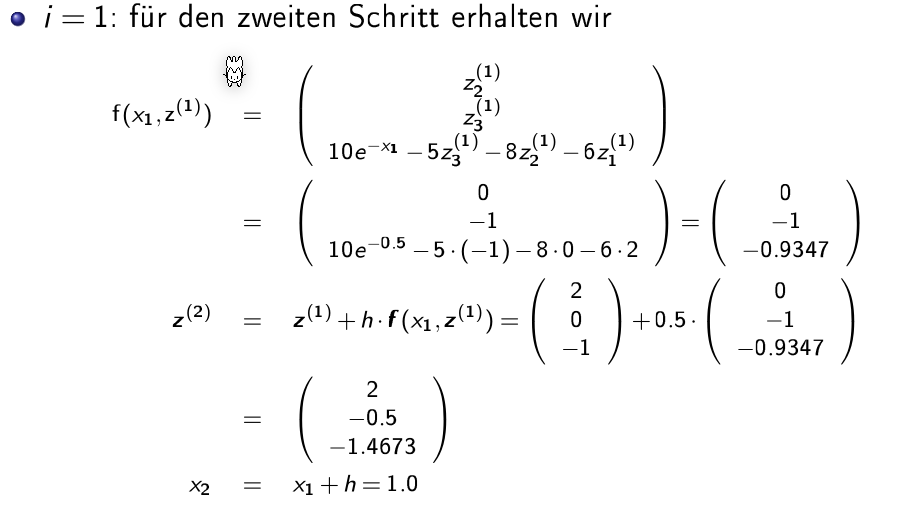
Beispiel
Das folgende Beispiel kommt aus dem nächsten Unterkapitel "Differentialgleichung k-ter Ordnung zu DGL-System". $$ \begin{align} z_1'&=z_2\ z_2'&=z_3\ z_3'&=10e^{−x} − 5z_3 − 8z_2 − 6z_3 \end{align} $$ Zu dem gelten folgende Anfangswerte: $$ \vec z(0)=\begin{pmatrix}2 \ 0 \ 0\end{pmatrix} $$ Nun kommen die Iterationen:
Differentialgleichung k-ter Ordnung zu DGL-System
Um eine Differentialgleichung mit Ableitungen höher als erster Ableitungen zu lösen gibt es einen Trick: $$ y'''+5y''+ 8y' + 6y = 10e^{-x} $$
-
Nachh der höchsten Ableitung umformen: \(y''' = 10e^{−x} − 5y'' − 8y' − 6y\)
-
Alle Ableitungen von \(y\) tiefer als die höchste Ableitungen durch \(z_i\) ersetzen: \(z_1=y, z_2=y', z_3=y''\)
-
Und in der Gleichung einsetzen \(y''' = 10e^{−x} − 5y'' − 8y' − 6y\Rightarrow z_3'=y''' = 10e^{−x} − 5z_3 − 8z_2 − 6z_3\)
-
Es sind nun drei Gleichungen: \(z_1'=y'=z_2\)
\(z_2'=y''=z_3\)
\(z_3' = 10e^{−x} − 5z_3 − 8z_2 − 6z_3\) -
In diesem Fall können sie auch vektoriel geschrieben werden: \(\begin{pmatrix}z_2 \\ z_3 \\ 10e^{−x} − 5z_3 − 8z_2 − 6z_3 \end{pmatrix}=\begin{pmatrix}z_1' \\ z_2' \\ z_3'\end{pmatrix}\)
Mit der Start-Bedingungen: \(\vec z(0)=\begin{pmatrix}0 \\ 0 \\ 0\end{pmatrix}\)
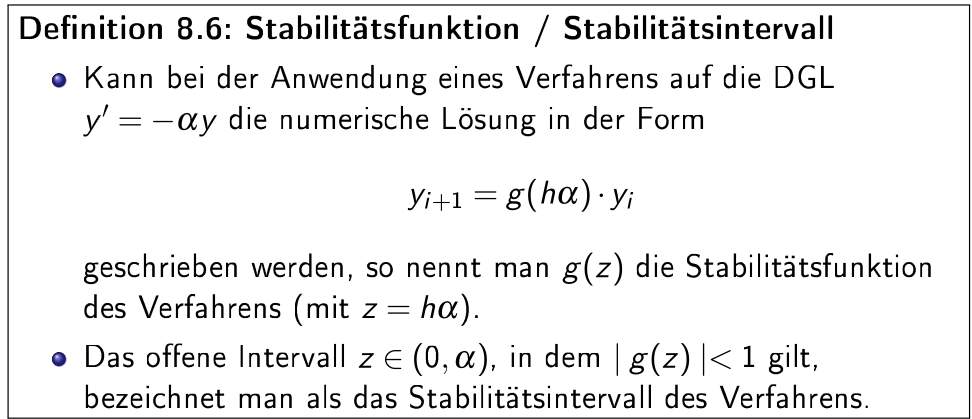
Stabilität
Wie stabil eine Lösung einer DGL ist hängt von dem benutzten Verfahren, der Schrittbreite und dem spezifischen Anfangsproblem ab.