Interpolation
Gegeben sind \(n+1\) Stützpunkte/Wertpaare \((x_i, y_i)\), wobei \(x_i \neq x_i\) für \(i\neq j\) gelten muss. Gesucht ist nun eine stetige Funktion \(g\) mit der Eigenschaft \(g(x_i)=y_i\) für alle \(i=0, ..., n\)
Polynominterpolation
Wenn \(n+1\) Stützpunkte gegen sind, kann das Polynom \(P_n(x)=a_0 + a_1x + a_2+x^2 + ... + a_nx^n\)
Wenn \(x\) ein Vektor ist, kann auch eine Vandermonde-Matrix gebildet werden: $$ \begin{align} a_0 + a_1x_0 + a_2+x_0^2 + ... &+ a_nx_0^n\ a_0 + a_1x_1 + a_2+x_1^2 + ... &+ a_nx_1^n\ ...& \ a_0 + a_1x_n + a_2+x_n^2 + ... &+ a_nx_n^n\ \end{align} $$
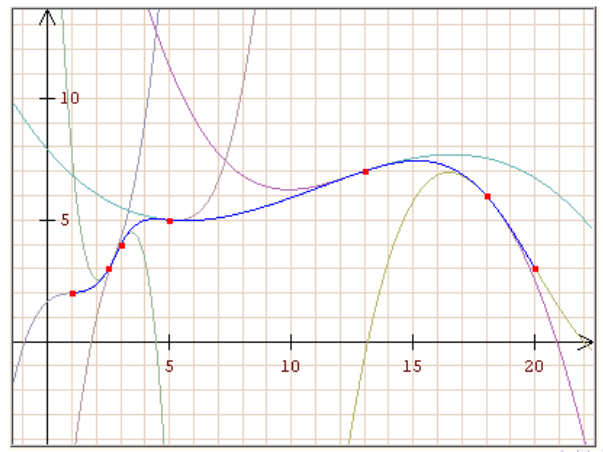
Diese Rechnung ist allerdings oft schlecht Konditioniert und wird für \(n> 20\) Stützpunkte instabil. Ein möglichen Ersatz ist das Lagrange Polynom
Lagrange Interpolation
Das Lagrange Polynom kann für \(n\) Stützpunkte berechnet werden und ergibt ein Polynom mit dem Rang \(n-1\). $$ P_n(x)=\sum^n_{i=0}I_i(x)y_i\ I_i(x)=\prod^n_{\substack{j=0\i\neq j}}\frac{x-x_j}{x_i-x_j} $$ Der maximale absoluten Fehler der dabei entstehen kann ist: $$ |f(x)-P_n(x)| \le \frac{|(x-x_0)(x-x_1)...(x-x_n)|}{(n+1)!}\cdot(\max_{x0\le \xi \le x_n}|f^{(x+1)}(\xi)|) $$ Als Bemerkung \(f^{(x+1)}\) ist die \((x+1)\)-te Ableitung
Da für die Fehlerberechnung die eigentliche Funktion \(f\) benötigt wird, ist dies recht nutzlos.
Spline Interpolation
Es wird für jedes Intervall \([x_i, x_{i+1}]\) (für \(i=0, 1, 2,, ..., n-1\)) wird ein Polynom \(s_i\) angesetzt. Das Polynom muss folgende Gleichungen erfüllen:
- Es muss durch alle Punkte im Intervall \([x_i, x_{i+1}]\) gehen \(s_i(x_i)=y, s_i(x_{i+1})=y_{i+1}, ...\)
- Der Übergang zwischen den Polynomen muss stetig sein \(s_i(x_{i+1})=s_{i+1}(x_{i+1})\)
- Es darf kein Knick beinhalten \(s_i'(x_{i+1})=s_{i+1}'(x_{i+1})\)
- Die Krümmung von zwei Splines soll auch gleich sein \(s_i''(x_{i+1})=s_{i+1}''(x_{i+1})\)
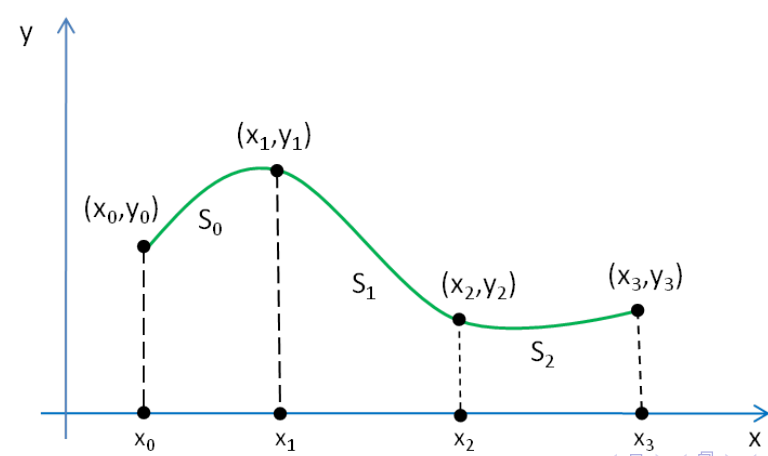
Um die Spline von oben zu berechnen, können nun folgende Polynome definiert werden: $$ \begin{align} S_0&=a_0+b_0(x-x_0)+c_0(x-x_0)^2 + d_0(x-x_0)^3 &, x\in [x_0, x_1] \ S_1&=a_1+b_1(x-x_1)+c_1(x-x_1)^2 + d_1(x-x_1)^3 &, x\in [x_1, x_2]\ S_2&=a_2+b_2(x-x_2)+c_2(x-x_2)^2 + d_2(x-x_2)^3 &, x\in [x_2, x_3]\ \end{align} $$ Aus diesen können nun folgendes Gleichungssytem aufgestellt werden: $$ \begin{align} S_0(x_0)&=y_0\ S_1(x_1)&=y_1 \ S_2(x_2)&=y_2 \ S_2(x_3)&=y_3 \ \ S_0(x_1)&=S_1(x_1)\ S_1(x_2)&=S_2(x_2)\ \ S_0'(x_1)&=S_1'(x_1)\ S_1'(x_2)&=S_2'(x_2)\ \ S_0''(x_1)&=S_1''(x_1)\ S_1'0(x_2)&=S_2''(x_2)\ \end{align} $$ Dies sind aber "nur" 10 Gleichungen, nicht die benötigten 12. Daher gibt es noch zusätzliche Bediungen:
- natürliche kubische Splinefunktion \(S_0''(x_0)=0, S_2(x_3)''=0\)
- peridodische kubische Splinefunktion \(S_0'(x0)=S_2'(x_3), S_0''(x0)=S_2''(x_3)\)
- kubische Spliefunktion (mit not-a-knot Bedinungen) \(S_0'''(x_1)=S_1'''(x_1), S_1'''(x_2)=S_2'''(x_2)\)
Algorithmus
Für \(n+1\) Stützpunkte werden \(n\) Gleichungen nach der Form \(S_i=a_i+b_i(x-x_i)+c_i(x-x_i)^2 + d_i(x-x_i)^3, x\in [x_i, x_{i+1}]\) gesucht. Dafür kann folgender Algorithmus für jedes \(S_i\) angewendet werden:
- Wenn die natürliche kubische Splinefunktion gesucht ist, wird \(c\) auf \(0\) gesetzt damit die zweite Ableitung \(0\) ergibt \(c_0=0, c_n=0\)
- Für jedes Polynom \(S_i\)
- \(a_i=y_i\)
- Die Breite des Intervalles \(h_i=x_{i+1}-x_i\)
- \(c_i\) bestimmen
- \(b_i\) und \(d_i\) für jedes \(S_i\) bestimmen
- \(b_i=\frac{y_{i+1}-y_i}{h_i}-\frac{h_i}{3}(c_{i+1}+2c_i)\)
- \(d_i=\frac 1{3h_i}(c_{i+1}-c_i)\)
Für das Beispiel \(...\):
| \(i\) | 0 | 1 | 2 | 3 |
|---|---|---|---|---|
| \(x_i\) | 0 | 1 | 2 | 3 |
| \(y_i\) | 2 | 1 | 2 | 2 |
| \(a_i\) | 2 | 1 | 2 | - |
| \(h_i\) | 1 | 1 | 1 | - |
| \(c_i\) | 0 | ? | ? | 0 |
Um \(c_1\) und \(c_2\) zu finden kann folgendes Gleichungssystem gelöst werden: $$ A=\begin{pmatrix} 2(h_0+g_1) & h_1 \ h_1 & 2(h_1+h_2) \end{pmatrix} \ \vec z = \begin{pmatrix} 3\frac{y_2 - y_1}{h_1} - 3\frac{y_1-y_0}{h_0}\ 3\frac{y_3 - y_2}{h_2} - 3\frac{y_2-y_1}{h_1}\ ... \ 3\frac{y_n - y_{n-1}}{h_{n-1}} - 3\frac{y_{n_1}-y_{n-2}}{h_{n-}}\ \end{pmatrix}\ A \cdot \begin{pmatrix}c_1 \ c_2 \end{pmatrix} = \vec z $$
Lineare Ausgleichunsrechnung
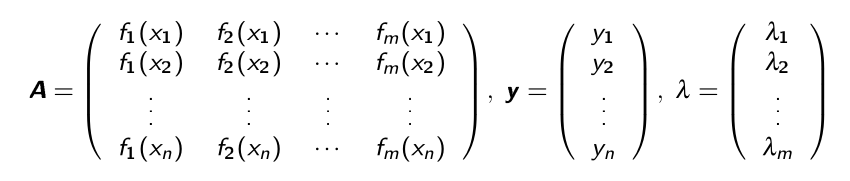
Es wird eine Funktion gesucht, in der Form: $$ f(x)=\lambda_1f_1(x)+... + \lambda_mf_m(x) $$ Ein mögliches Beispiel wäre: \(f(x)=\lambda_1 \cdot \underbrace{1}_{f_1(x)} + \lambda_2\cdot \underbrace x_{f_2(x)} + \lambda_3 \cdot \underbrace{x^2}_{f_3(x)}\)
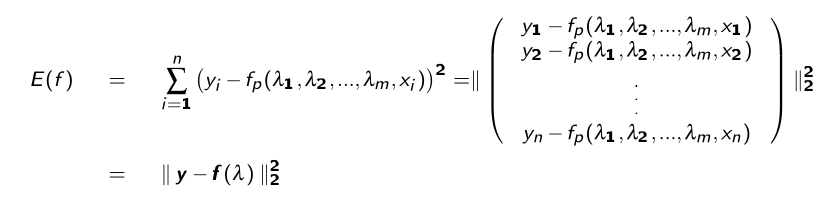
Um nun die \(\lambda\)s zu finden, damit \(f(x)\) Datenpunkte nachgeht, muss der Fehler \(E(f)\) zu den Datenpunkten minimieren:
$$ E(f)=w\cdot||y_f-(x)||2^2 = \sum^nw_i\cdot (y_i - f(x_i))^2 $$ Mit \(w\) kann ein Punkt stärker oder schwächer gewichtet werden
Um dies zu minimieren, wird die Ableitung von \(E(f)=0\) gesetzt:
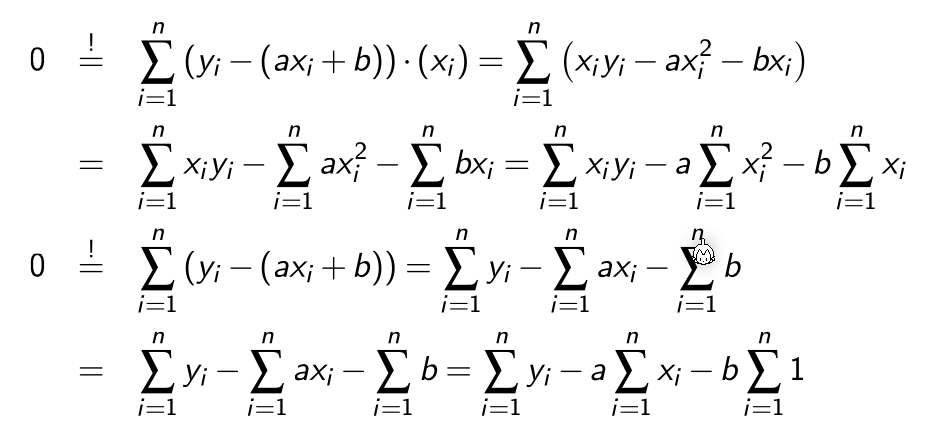
Aus dem folgt:
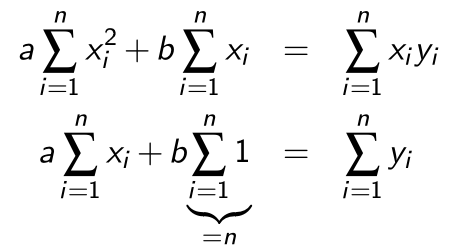

Dies funktioniert allerdings nur für eine Gerade. Die selbe Methode kann aber auch für höhere Polynomen verwendet werden:
$$
E(f)=||\vec y-f(\vec x)||2^2=\sum^n\lambda_jf_j(x_i)\right)^2=||\vec y-A\lambda||_2^2
$$
Mit folgender Matrix }(y_i-f(x_i))^2 = \sum^n_{i=1}\left(y_i - \sum^m_{j=1\(A\):
Die Gleichung \(E(f)=0\) hat nur im Spezialfall eine Lösung, wenn \(m=n\) und wenn die Funktion \(f\) durch alle Punkte geht.
Normalgleichungen
Um \(E(f)\) zu minimieren muss die erste Ableitung von \(E'(f)=0\) sein. Daher muss \(E(f)\) nach jedem \(\lambda\) abgeleitet werden: $$ \frac{\part E(f)(\lambda_1, ..., \lambda_m)}{\part \lambda_j}=0 , j=0,...,m $$ Dies nennt sich eine Normalgleichung und lässt sich als \(A^TA\lambda=A^Ty\).
\(A\) ist oft schlecht konditioniert und die Lösung sollte daher mit dem QR-Verfahren gelöst werden.
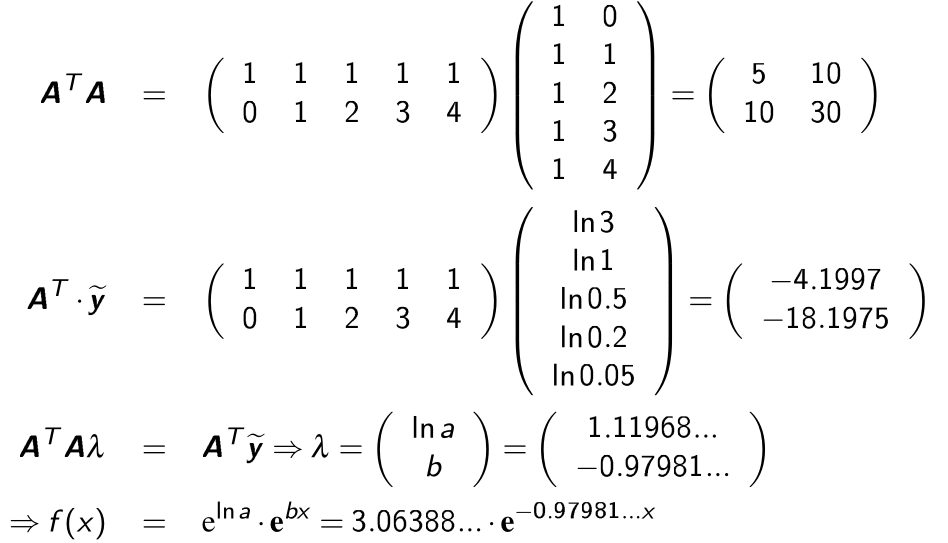
Linearisieren
Falls eine \(f\) Funktion auf den ersten Blick nicht linear erscheint, kann sie eventuell linearisiert werden.
Z.B. die Funktion \(ae^{bx}\) kann mit \(\log_e\) linearisiert werden.

Nicht-Lineare Ausgleichsrechnung
Das allgemeine Ausgleichsproblem besteht darin folgendes \(E\) zu minimieren:
Die Ableitung von \(E\) wird auf \(E'(f)=0\) gesetzt. Dafür kann das Gauss-Newton-Verfahren.
Gauss-Newton-Verfahren
Das Quadratmittelproblem ist es einen Vektor \(x\in\R^m\) zu finden, welcher die Fehlerfunktional \(E: \R^m \to \R:=||g(x)||_2^2\) minimiert. \(E\) gehört zur Funktion \(g: \R^m \to \R^n\)
\(g\) wird nun definiert als \(g(\lambda):=y-f(\lambda)\).
Um nun für eine nicht lineare Funktionen \(f\) eine Lösung zu finden, muss \(f\) linearisiert werden: $$ \begin{align} g(\lambda)&\approx g(\lambda_0)+Dg(\lambda_0)\cdot(\lambda - \lambda_0)\ \ Dg(x)&=\begin{pmatrix} \frac{\partial g_1}{\partial x_1}(\vec x) & \frac{\partial g_1}{\partial x_2}(\vec x) & ... & \frac{\partial g_1}{\partial x_n}(\vec x) \
\frac{\partial g_2}{\partial x_1}(\vec x) & \frac{\partial g_2}{\partial x_2}(\vec x) & ... & \frac{\partial g_2}{\partial x_n}(\vec x) \
... & ... & ... & ... \ \frac{\partial g_m}{\partial x_1}(\vec x) & \frac{\partial g_m}{\partial x_2}(\vec x) & ... & \frac{\partial g_m}{\partial x_n}(\vec x) \ \end{pmatrix} \end{align} $$ \(E\) kann nun folgendermassen definiert werden: $$ \tilde E(\lambda) = ||\underbrace{g(\lambda_k)}{\tilde y} + \underbrace{Dg(\lambda_k)}_\delta||_2^2 $$ Wobei } \cdot \underbrace{(\lambda-\lambda_k)\(k=0,1,...\) ist.
Dies kann nun wie eine lineare Gleichung gelöst werden: $$ Dg(\lambda_k)^TDg(\lambda_k)\delta_k=-Dg(\lambda_k)^T\cdot g(\lambda_k) $$ Oder mit dem QR-Verfahren: $$ Dg(\lambda_k)=Q_kR_k\ R_k\lambda_k=-Q_k^Tg(\lambda_k) $$ Für jedes \(k\) wird nun \(\tilde E\) minimiert, bzw. die obere Gleichung aufgelöst.
Das nächste \(\lambda\) kann wie folgt ausgerechnet wird: $$ \lambda_{k+1}=\lambda_k+\delta_k $$
Gedämpftes Gauss-Newton-Verfahren
Das gedämpte Gauss-Netwon-Verfahren funktioniert gleich, wie das "normale" Verfahren, nur das \(\delta_k\) verkleinert wird.
Um das \(\delta_k\) für die nächste Iteration zu finden, soll folgende für folgende Formel das minimale \(p\in{0, 1, ..., p_{max}}\) gefunden werden $$ ||g\left(\lambda_k+\frac{\delta_k}{2^p}\right)||2^2 < ||g(\lambda_k)||_2^2 $$ \(\lambda_{k+1}\) wird nun folgendermassen berechnet: $$ \lambda $$ Falls kein minimales }=\lambda_k+\frac{\delta_k}{2^p\(p\) gefunden werden kann, wird mit \(p=0\) gerechnet.