Nichtlineare Gleichungssysteme
Multivariate Funktionen
Skalarwertige Funktion
Eine Funktion, welche mehrere \(x\)-Werte nimmt und ein \(y\)-Wert zurück gibt. $$ f: \mathbb R ^n \to \mathbb R \ y = f(x_1, x_2, ..., x_n) $$
Vektorwertige Funktion
Eine Funktion, welche mehrere \(x\)-Werte nimmt und mehrere \(y\)-Werte zurück gegeben $$ f: \mathbb R^n \to \mathbb R^m \ (y_1, y_2, ..., y_m) = f(x_1, x_2, ..., x_n) $$
Explizite und implizite Funktionen
Explizite Funktionen haben die folgende Form: \(y=f(x_1, x_2, ..., x_n)\)
Implizite Funktionen haben die folgende Form: \(F(x_1, x_2, ..., x_n, y)=0\)
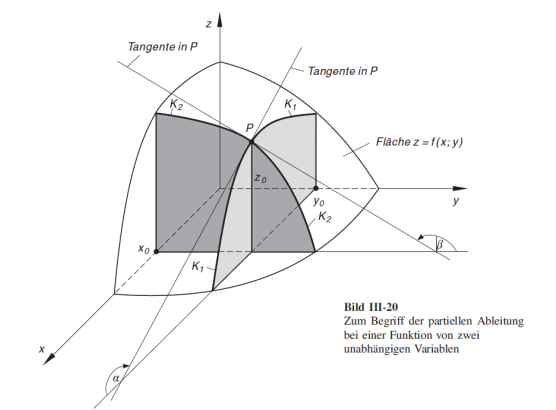
Partielle Ableitung
Um die Funktion \(z=f(x, y) = 2x^2 + 5 y\) abzuleiten, kann nach \(x\) und \(y\) separat abgeleitet werden: $$ \begin{align} \text{nach }x: \frac{\partial f}{\partial x} &= 4x + 0 \ \text{nach }y: \frac{\partial f}{\partial y} &= 0 + 5 \ \end{align} $$ Diese Ableitung kann folgendermassen visualisiert werden:
Jacobi-Matrix
Für die Funktion \(f: \mathbb R^n \to \mathbb R^m\) mit \(\vec y = f(\vec x)=\begin{pmatrix}y_1=f_1(\vec x) \\ y_2 = f_2(\vec x)\\ ... \\ y_m=f_m(\vec x)\end{pmatrix}\) und \(\vec x = (x_1, x_2, ..., x_n)^T\) ist die Jacobi-Matrix das folgende: $$ Df(x)=\begin{pmatrix} \frac{\partial f_1}{\partial x_1}(\vec x) & \frac{\partial f_1}{\partial x_2}(\vec x) & ... & \frac{\partial f_1}{\partial x_n}(\vec x) \
\frac{\partial f_2}{\partial x_1}(\vec x) & \frac{\partial f_2}{\partial x_2}(\vec x) & ... & \frac{\partial f_2}{\partial x_n}(\vec x) \
... & ... & ... & ... \ \frac{\partial f_m}{\partial x_1}(\vec x) & \frac{\partial f_m}{\partial x_2}(\vec x) & ... & \frac{\partial f_m}{\partial x_n}(\vec x) \ \end{pmatrix} $$ In dieser Matrix ist in einer Reihe alle möglichen partiellen Ableitungen für \(f_1(\vec x)\)
Linearisierung
Eine Approximation für \(y=f(x)\) kann mit \(f(x)\approx f(x_0) + f'(x-x_0)\).
Dasselbe kann auch für eine multivariante Funktion mithilfe der Jacobi-Matrix getan werden: \(g(\vec x)=f(\vec {x_0}) + Df(\vec {x_0})\cdot (\vec x-\vec {x_0})\)
(\(Df(\vec x)\) ist die Jacobi-Matrix)
Nach dem Linearisieren wird ein nichtlineare Funktion lineare und kann mit bekannten Verfahren gelöst werde
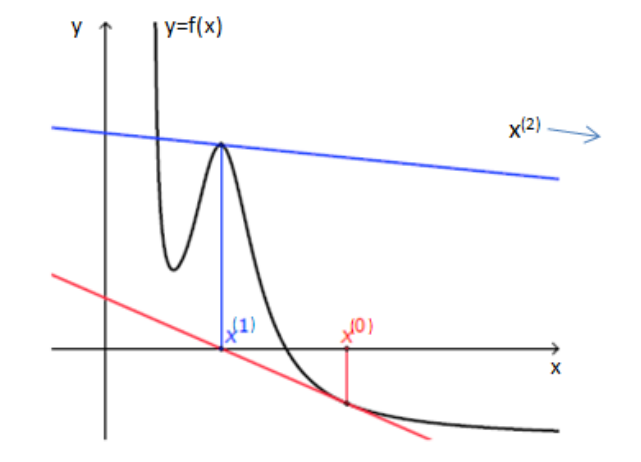
Newton-Verfahre
Das Newton-Verfahren erwartet, dass \(f(\vec x_n)=\vec 0\) gilt.
Um nicht die Jacobi-Matrix invertieren zu müssen, kann folgender Trick angewendet werden: $$ \vec \delta_n :=-(Df(\vec x_n))^{-1}\cdot f(\vec x_n)\ \text{Dies kann in folgendes Umgewandlet werden:}\ Df(\vec x_n)\cdot \vec\delta x_n = -f(\vec x_n) $$ Die Gleichung \(Df(\vec x_n)\cdot \vec\delta x_n = -f(\vec x_n)\) ist ein lineares Gleichungssystem, welches relativ einfach gelöst werden kann. Danach kann \(\vec \delta _n\) anstelle von \(-(Df(\vec x_n))^{-1}\cdot f(\vec x_n)\) verwendet werden: \(\vec x_{n+1}=\vec x_n+\vec \delta_n\)
Das Newton-Verfahren konvergiert quadratisch für nah genug an einer Nullstelle \(\overline x\) liegende Startwerte, wenn \(Df(\overline x)\) regulär und \(f\) dreimal stetig differenzierbar ist.
Für eine Nichtreguläre Matrix A gilt \(\det(A)\ne 0\)
Mögliche Abbruchskriterien sind:
- \(n > n_{max}\)
- \(||\vec x_{n+1}-\vec x_n||\le ||\vec x_{n+1}||\cdot \varepsilon\)
- \(||\vec x_{n+1}-\vec x_n||\le \varepsilon\)
- \(||f(\vec x_{n+1})||\le \varepsilon\)$
Vereinfachtes Newton-Verfahren
Beim regulären Newton-Verfahren muss bei jeden Iterationsschritt die Jacobi-Matrix \(Df(\vec x)\) neuberechnen. Beim vereinfachten Newton-Verfahren wird \(Df(\vec x)\) nur für den Startvektor berechnet. $$ \vec x_{n+1}=\vec x_n-(Df(\vec x_0))^{-1}\cdot f(\vec x_n)\ Df(\vec x_0)\cdot \vec\delta x_n = -f(\vec x_n) $$ Wegen dieser Vereinfachung kovergiert das Verfahren nur noch linear gegen die Nullstelle, wenn \(Df(\overline x)\) nicht regulär ist.
Gedämptes Newton-Verfahren
Wenn \(Df(\vec x_n)\) schlecht konvergiert, dann kann nicht generell erwartet werden, dass \(\vec x_{n+1}=\vec x_n + \vec \delta_n\) nicht gilt.
Für das gedämpfte Newton-Verfahren werden folgende Schritte angewendet:
- Berechne \(\delta_n\) mit \(Df(\vec x_n)\delta_n=-f(\vec x_n)\) ausgerechnet
- Finde das minimale \(k\in \{0, 1, ...\}\) für das gilt: \(||f(\vec x_n + \frac{\vec \delta_n}{2^k})||_2 < ||f(\vec x_n)||_2\)
- Wenn kein \(k\) gefunden wird, soll mit \(k=0\) weiter gerechnet werden
- Nun soll die Iterationsgleichung \(\vec x_{n+1}=\vec x_n + \frac{\vec \delta_n}{2^k}\) verwendet werden